ItemPick und ItemPickAI¶
Einführung¶
Das ItemPick und ItemPickAI Modul liefert eine gebrauchsfertige Perzeptionslösung, um robotische Pick-and-Place-Anwendungen zu realisieren. ItemPick detektiert ebene Oberflächen unbekannter Objekte für die Positionierung eines Sauggreifers. :cubestackonly:`ItemPickAI nutzt neuronale Netze, um Objekte einer bestimmten Objektkategorie zu segmentieren und orientierte und objektzentrierte Greifpunkte für Sauggreifer zu berechnen.
Darüber hinaus bietet das Modul:
- eine intuitiv gestaltete Bedienoberfläche für Inbetriebnahme, Konfiguration und Test auf der rc_cube Web GUI
- die Möglichkeit, sogenannte Regions of Interest (ROIs) zu definieren, um relevante Teilbereiche der Szene auszuwählen (siehe RoiDB)
- eine integrierte Load Carrier Erkennung (siehe LoadCarrier), um in Bin-Picking-Anwendungen („Griff in die Kiste“) Greifpunkte nur für Objekte in dem erkannten Load Carrier zu berechnen
- die Unterstützung von Load Carriern mit Fächern, sodass Greifpunkte für Objekte nur in einem definierten Teilvolumen des Load Carriers berechnet werden
- eine Kollisionsprüfung zwischen Greifer und Load Carrier und/oder der Punktwolke
- die Unterstützung von sowohl statisch montierten als auch robotergeführten Kameras. Optional kann es mit der Hand-Auge-Kalibrierung kombiniert werden, um Greifposen in einem benutzerdefinierten externen Koordinatensystem zu liefern.
- einen Qualitätswert für jeden vorgeschlagenen Greifpunkt, der die Ebenheit der für das Greifen verfügbaren Oberfläche bewertet
- Auswahl einer Strategie zum Sortieren der zurückgelieferten Greifpunkte
- eine 3D Visualisierung des Detektionsergebnisses mit Greifpunkten und einer Greiferanimation in der Web GUI
Bemerkung
Dieses Softwaremodul ist pipelinespezifisch. Änderungen seiner Einstellungen oder Parameter betreffen nur die zugehörige Kamerapipeline und haben keinen Einfluss auf die anderen Pipelines, die auf dem rc_cube laufen.
Bemerkung
In diesem Kapitel werden die Begriffe Cluster und Oberfläche synonym verwendet und bezeichnen eine Menge von Punkten (oder Pixeln) mit ähnlichen geometrischen Eigenschaften.
Das Modul ist ein optional erhältliches Module, welches intern auf dem rc_cube läuft und eine gesonderte ItemPick bzw. ItemPickAI Lizenz benötigt.
Berechnung der Greifpunkte¶
Das ItemPick und ItemPickAI Modul bietet einen Service, um Greifpunkte für Sauggreifer zu berechnen. Der Sauggreifer ist durch die Länge und Breite der Greiffläche definiert.
Das ItemPick-Modul identifiziert ebene Flächen in der Szene und unterstützt flexible und/oder deformierbare Objekte. Der Typ (type) dieser Objektmodelle (item_models) ist als unbekannt (UNKNOWN) definiert, da sie keine gebräuchliche geometrische Form aufweisen müssen. Optional kann eine minimale und maximale Größe angegeben werden.
Für ItemPickAI werden die Greifpunkte in der Mitte der oberen Oberfläche der segmentierten Objekte (items) der angegebenen Objektkategorie berechnet. Die Objektkategorie wird durch Festlegen des Typs (type) der Objektmodelle (item_models) ausgewählt. Derzeit werden die Typen BAG, CONSUMER_GOODS und SHEET_METAL unterstützt. BAG bezieht sich auf verformbare und flexible beutelartige Objekte mit unterschiedlichen Füllgraden, wie z.B. Beutelpackungen, Päckchen, Schüttgutsäcke, Versandtaschen, Papiertüten und Säcke. CONSUMER_GOODS umfasst allgemeine verpackte Konsumgüter wie verpackte Lebensmittel, Getränke, Toilettenartikel, Reinigungsmittel und andere erschwingliche Haushaltswaren. SHEET_METAL segmentiert flache, ebene Metallteile, z.B. lasergeschnittene Bleche.
Bemerkung
Der erste Aufruf der Erkennung mit dem Objektmodelltyp BAG, CONSUMER_GOODS oder SHEET_METAL dauert jeweils länger als die nachfolgenden Aufrufe, weil das Modell erst in das ItemPickAI-Modul geladen werden muss.
Optional können den Modulen zu einer Greifpunktberechnung weitere Informationen übergeben werden:
- die ID des Load Carriers, welcher die zu greifenden Objekte enthält
- ein Unterabteil (
load_carrier_compartment) innerhalb eines Load Carriers, in dem Objekte erkannt werden sollen (siehe Load Carrier Abteile). - die ID der 3D Region of Interest, innerhalb der nach dem Load Carrier gesucht wird, oder – falls kein Load Carrier angegeben ist – die 3D Region of Interest, innerhalb der Greifpunkte berechnet werden
- Informationen für die Kollisionsprüfung: Die ID des Greifers, um die Kollisionsprüfung zu aktivieren, und optional ein Greif-Offset, der die Vorgreifposition definiert. Details zur Kollisionsprüfung sind in CollisionCheck gegeben.
Ein vom BoxPick-Modul ermittelter Greifpunkt repräsentiert die empfohlene Pose des TCP (Tool Center Point) des Sauggreifers. Der Greifpunkt type ist immer auf SUCTION gesetzt.
Für ItemPick mit dem Objektmodelltyp UNKNOWN liegt der Ursprung der berechneten Greifposen pose im Mittelpunkt der größten von der jeweiligen Greiffläche umschlossenen Ellipse.
Für ItemPickAI mit dem Objektmodelltyp BAG, CONSUMER_GOODS oder SHEET_METAL liegen die Greifpunkte im Mittelpunkt der oberen Fläche der segmentierten Objekte.
Die Orientierung des Greifpunkts ist ein rechtshändiges Koordinatensystem, sodass die z-Achse orthogonal zur Greiffläche in das zu greifende Objekt zeigt und die x-Achse entlang der längsten Ausdehnung ausgerichtet ist.Da die x-Achse zwei mögliche Richtungen haben kann, wird diejenige ausgewählt, die besser zur bevorzugten TCP-Ausrichtung passt (siehe Setzen der bevorzugten TCP-Orientierung). Wenn der Laufzeitparameter allow_any_grasp_z_rotation auf True gesetzt ist, wird die x-Achse nicht zwangsweise an der maximalen Dehnung der greifbaren Ellipse ausgerichtet, sondern kann eine beliebige Drehung um die z-Achse aufweisen. In diesem Fall hat der zurückgegebene Greifpunkt die Ausrichtung, die am besten zur bevorzugten TCP-Ausrichtung passt und kollisionsfrei ist, wenn die Kollisionsprüfung aktiviert ist.
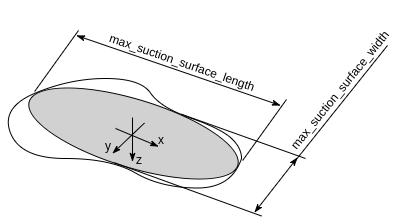
Abb. 19 Veranschaulichung eines berechneten Greifpunktes mit Koordinatensystem und der zugehörigen Ellipse, welche die Greiffläche bestmöglich beschreibt.
Zusätzlich enthält jeder Greifpunkt die Abmessungen der maximal verfügbaren Greiffläche, die als Ellipse mit den Achslängen max_suction_surface_length und max_suction_surface_width beschrieben wird. Der Nutzer kann Greifpunkte mit zu kleinen Greifflächen herausfiltern, indem die minimalen Abmessungen der Greiffläche, die vom Sauggreifer benötigt wird, angegeben werden. Wenn der Laufzeitparameter allow_any_grasp_z_rotation auf True gesetzt ist, dann sind die Achslängen max_suction_surface_length und max_suction_surface_width gleich und entsprechen der kürzeren Achse der größtmöglichen Greifellipse.
Jeder Greifpunkt enthält auch einen Qualitätswert (quality), der einen Hinweis auf die Ebenheit der Greiffläche gibt. Dieser Wert reicht von 0 bis 1, wobei höhere Werte für eine ebenere rekonstruierte Oberfläche stehen.
Jeder berechnete Greifpunkt lässt sich anhand einer uuid (Universally Unique Identifier) eindeutig identifizieren und enthält zusätzlich den Zeitstempel der ältesten Bildaufnahme, auf der die Greifpunktberechnung durchgeführt wurde.
Die Sortierung der Greifpunkte basiert auf der ausgewählten Sortierstrategie. Folgende Sortierstrategien sind verfügbar und können über die Web GUI oder über den set_sorting_strategies Service gesetzt werden:
gravity: höchste Greifpunkte entlang der Gravitationsrichtung werden zuerst zurückgeliefert.surface_area: Greifpunkte mit den größten Oberflächen werden zuerst zurückgeliefert.direction: Greifpunkte mit dem kleinsten Abstand entlang der gesetzten Richtungvectorim angegebenen Referenzkoordinatensystempose_framewerden zuerst zurückgeliefert.distance_to_point: Greifpunkte mit dem kleinsten oder größten (fallsfarthest_firstauf true gesetzt ist) Abstand von einem gesetzten Sortierpunktpointim angegebenen Referenzkoordinatensystempose_framewerden zuerst zurückgeliefert.
Wenn keine Sortierstrategie gesetzt ist, oder die Standard-Sortierstrategie in der Web GUI ausgewählt ist, geschieht die Sortierung der Greifpunkte basierend auf einer Kombination von gravity und surface_area.
Setzen der bevorzugten TCP-Orientierung¶
Das ItemPick und ItemPickAI-Modul berechnet die Erreichbarkeit von Greifpunkten basierend auf der bevorzugten Orientierung des TCPs. Die bevorzugte Orientierung kann über den Service set_preferred_orientation oder über die CADMatch-Seite in der Web GUI gesetzt werden. Die bevorzugten Orientierung des TCPs wird genutzt, um Greifpunkte zu verwerfen, die der Greifer nicht erreichen kann, und kann auch zur Sortierung der Greifpunkte genutzt werden.
Die bevorzugte TCP-Orientierung kann im Kamerakoordinatensystem oder im externen Koordinatensystem gesetzt werden, wenn eine Hand-Auge-Kalibrierung verfügbar ist. Wenn die bevorzugte TCP-Orientierung im externen Koordinatensystem definiert ist, und die Kamera am Roboter montiert ist, muss bei jedem Aufruf der Objekterkennung die aktuelle Roboterpose angegeben werden. Wenn keine bevorzugte TCP-Orientierung gesetzt wird, wird die Orientierung der linken Kamera (siehe Coordinate frames im rc_visard Handbuch) als die bevorzugte TCP-Orientierung genutzt.
Wechselwirkung mit anderen Modulen¶
Die folgenden, intern auf dem rc_cube laufenden Module liefern Daten für das ItemPick und ItemPickAI-Modul oder haben Einfluss auf die Datenverarbeitung.
Bemerkung
Jede Konfigurationsänderung dieser Module kann direkte Auswirkungen auf die Qualität oder das Leistungsverhalten des ItemPick und ItemPickAI-Moduls haben.
Kamera- und Tiefendaten¶
Folgende Daten werden vom ItemPick und ItemPickAI-Modul verarbeitet:
- die rektifizierten Bilder des Kamera Modul (
rc_camera)
- die Disparitäts-, Konfidenz- und Fehlerbilder des Stereo-Matching Modul (
rc_stereomatching), falls eine Stereokamera verwendet wird.
- die Disparitäts-, Konfidenz- und Fehlerbilder des Blaze Modul (
rc_blaze), falls eine Basler blaze Kamera verwendet wird
Für alle genutzten Bilder ist garantiert, dass diese nach dem Auslösen des Services aufgenommen wurden.
IOControl und Projektor-Kontrolle¶
Für den Anwendungsfall, dass der rc_cube zusammen mit einem externen Musterprojektor und dem Modul für IOControl und Projektor-Kontrolle (rc_iocontrol) betrieben wird, wird empfohlen, den Projektor an GPIO Out 1 anzuschließen und den Aufnahmemodus des Stereokamera-Moduls auf SingleFrameOut1 zu setzen (siehe Stereomatching-Parameter), damit bei jedem Aufnahme-Trigger ein Bild mit und ohne Projektormuster aufgenommen wird.
Alternativ kann der verwendete digitale Ausgang in den Betriebsmodus ExposureAlternateActive geschaltet werden (siehe Beschreibung der Laufzeitparameter).
In beiden Fällen sollte die Belichtungszeitregelung (exp_auto_mode) auf AdaptiveOut1 gesetzt werden, um die Belichtung beider Bilder zu optimieren.
Hand-Auge-Kalibrierung¶
Falls die Kamera zu einem Roboter kalibriert wurde, kann das ItemPick und ItemPickAI-Modul automatisch Posen im Roboterkoordinatensystem ausgeben. Für die Services kann das Koordinatensystem der berechneten Posen mit dem Argument pose_frame spezifiziert werden.
Zwei verschiedene Werte für pose_frame können gewählt werden:
- Kamera-Koordinatensystem (
camera): Alle Posen sind im Kamera-Koordinatensystem angegeben und es ist kein zusätzliches Wissen über die Lage der Kamera in seiner Umgebung notwendig. Das bedeutet insbesondere, dass sich ROIs oder Load Carrier, welche in diesem Koordinatensystem angegeben sind, mit der Kamera bewegen. Es liegt daher in der Verantwortung des Anwenders, in solchen Fällen die entsprechenden Posen der Situation entsprechend zu aktualisieren (beispielsweise für den Anwendungsfall einer robotergeführten Kamera). - Benutzerdefiniertes externes Koordinatensystem (
external): Alle Posen sind im sogenannten externen Koordinatensystem angegeben, welches vom Nutzer während der Hand-Auge-Kalibrierung gewählt wurde. In diesem Fall bezieht das ItemPick- oder BoxPick-Modul alle notwendigen Informationen über die Kameramontage und die kalibrierte Hand-Auge-Transformation automatisch vom Modul Hand-Auge-Kalibrierung. Für den Fall einer robotergeführten Kamera ist vom Nutzer zusätzlich die jeweils aktuelle Roboterposerobot_poseanzugeben.
Bemerkung
Wenn keine Hand-Auge-Kalibrierung durchgeführt wurde bzw. zur Verfügung steht, muss als Referenzkoordinatensystem pose_frame immer camera angegeben werden.
Zulässige Werte zur Angabe des Referenzkoordinatensystems sind camera und external. Andere Werte werden als ungültig zurückgewiesen.
Für den Fall einer robotergeführten Kamera ist es abhängig von pose_frame und der Sortierrichtung bzw. des Sortierpunktes nötig, zusätzlich die aktuelle Roboterpose (robot_pose) zur Verfügung zu stellen:
- Wenn
externalalspose_frameausgewählt ist, ist die Angabe der Roboterpose obligatorisch. - Wenn die Sortierrichtung in
externaldefiniert ist, ist die Angabe der Roboterpose obligatorisch. - Wenn der Sortierpunkt für die Abstandssortierung in
externaldefiniert ist, ist die Angabe der Roboterpose obligatorisch. - In allen anderen Fällen ist die Angabe der Roboterpose optional.
LoadCarrier¶
Das ItemPick und ItemPickAI-Module nutzt die Funktionalität zur Load Carrier Erkennung aus dem LoadCarrier Modul (rc_load_carrier) mit den Laufzeitparametern, die für dieses Modul festgelegt wurden. Wenn sich jedoch mehrere Load Carrier in der Szene befinden, die zu der angegebenen Load Carrier ID passen, wird nur einer davon zurückgeliefert. In diesem Fall sollte eine 3D Region of Interest gesetzt werden, um sicherzustellen, dass immer derselbe Load Carrier für das ItemPick und ItemPickAI-Modul verwendet wird.
CollisionCheck¶
Die Kollisionsprüfung kann für die Greifpunktberechnung des ItemPick und ItemPickAI-Moduls aktiviert werden, indem das collision_detection Argument an den compute_grasps oder compute_grasps_extended Service übergeben wird. Es enthält die ID des benutzten Greifers und optional einen Greif-Offset. Der Greifer muss im GripperDB Modul definiert werden (siehe Erstellen eines Greifers) und Details über die Kollisionsprüfung werden in Integrierte Kollisionsprüfung in anderen Modulen gegeben.
Wenn die Kollisionsprüfung aktiviert ist, werden nur kollisionsfreie Greifpunkte zurückgeliefert. Jedoch werden in den Visualisierungen auf der ItemPick:cubestackonly:bzw. ItemPickAI -Seite der Web GUI kollidierende Greifpunkte als schwarze Ellipsen dargestellt.
Die Laufzeitparameter des CollisionCheck-Moduls beeinflussen die Kollisionserkennung wie in CollisionCheck-Parameter beschrieben.
Parameter¶
Das ItemPick und ItemPickAI-Modul wird in der REST-API als rc_itempick bezeichnet und in der Web GUI in der gewünschten Pipeline unter und dargestellt. Wenn beide Lizenzen, ItemPick und ItemPickAI, auf einem Gerät vorhanden sind, wird die ItemPick-Funktionalität in die ItemPickAI Seite der Web GUI integriert. Der Benutzer kann die Parameter entweder dort oder über die REST-API-Schnittstelle ändern.
Die angebotenen Services von rc_itempick können mithilfe der REST-API-Schnittstelle oder der rc_cube Web GUI ausprobiert und getestet werden.
Übersicht über die Parameter¶
Dieses Softwaremodul bietet folgende Laufzeitparameter:
| Name | Typ | Min. | Max. | Default | Beschreibung |
|---|---|---|---|---|---|
allow_any_grasp_pose |
bool | false | true | false | Bestimmt, ob die Greifpunkte beliebig dort auf dem Objekt platziert sein dürfen, wo ebene Greifflächen detektiert werden |
allow_any_grasp_z_-rotation |
bool | false | true | false | Bestimmt, ob die Greifpunkte beliebige Orientierung haben dürfen, anstatt an der Hauptachse der greifbaren Ellipse ausgerichtet zu sein |
check_collisions_with_-point_cloud |
bool | false | true | false | Gibt an, ob Kollisionen zwischen Greifer und anderen Matches geprüft werden |
cluster_max_curvature |
float64 | 0.005 | 0.5 | 0.11 | Maximal erlaubte Krümmung für Greifflächen |
cluster_max_dimension |
float64 | 0.05 | 2.0 | 0.3 | Maximum allowed diameter for a cluster in meters. Clusters with a diameter larger than this value are not used for grasp computation. |
clustering_discontinuity_-factor |
float64 | 0.1 | 5.0 | 1.0 | Erlaubte Unebenheit von Greifflächen |
clustering_max_surface_-rmse |
float64 | 0.0005 | 0.01 | 0.004 | Maximal erlaubte Abweichung (Root Mean Square Error, RMSE) von Punkten zur Greiffläche in Metern |
clustering_patch_size |
int32 | 3 | 10 | 4 | Pixelgröße der Patches für die Unterteilung des Tiefenbildes im ersten Clustering-Schritt |
grasp_filter_orientation_-threshold |
float64 | 0.0 | 180.0 | 45.0 | Maximal erlaubte Orientierungsabweichung zwischen Greifpunkt und bevorzugter TCP-Orientierung in Grad |
max_grasps |
int32 | 1 | 100 | 5 | Maximale Anzahl von bereitgestellten Greifpunkten |
Beschreibung der Laufzeitparameter¶
Die Laufzeitparameter werden zeilenweise auf der ItemPick bzw. ItemPickAI Seite in der Web GUI dargestellt. Im folgenden wird der Name des Parameters in der Web GUI in Klammern hinter dem eigentlichen Parameternamen angegeben. Die Parameter sind in derselben Reihenfolge wie in der Web GUI aufgelistet:
max_grasps (Anzahl Greifpunkte)¶
ist die maximale Anzahl von bereitgestellten Greifpunkten.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?max_grasps=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?max_grasps=<value>
cluster_max_dimension (Maximale Größe, Nur für ItemPick)¶
is the maximum allowed diameter for a cluster in meters. Clusters with a diameter larger than this value are not used for grasp computation.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?cluster_max_dimension=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?cluster_max_dimension=<value>
cluster_max_curvature (Maximale Krümmung, Nur für ItemPick)¶
ist die maximal erlaubte Krümmung für Greifflächen. Je kleiner dieser Wert ist, desto mehr mögliche Greifflächen werden in kleinere Flächen mit weniger Krümmung aufgeteilt.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?cluster_max_curvature=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?cluster_max_curvature=<value>
clustering_patch_size (Patchgröße, Nur für ItemPick)¶
ist die Pixelgröße der Patches für die Unterteilung des Tiefenbildes im ersten Clustering-Schritt.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?clustering_patch_size=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?clustering_patch_size=<value>
clustering_discontinuity_factor (Unstetigkeitsfaktor, Nur für ItemPick)¶
beschreibt die erlaubte Unebenheit von Greifflächen. Je kleiner dieser Wert ist, umso mehr werden mögliche Greifflächen in kleinere Flächen mit weniger Unebenheiten aufgeteilt.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?clustering_discontinuity_factor=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?clustering_discontinuity_factor=<value>
clustering_max_surface_rmse (Maximaler RMSE, Nur für ItemPick)¶
ist die maximal erlaubte Abweichung (Root Mean Square Error, RMSE) von Punkten zur Greiffläche in Metern.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?clustering_max_surface_rmse=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?clustering_max_surface_rmse=<value>
grasp_filter_orientation_threshold` (Grasp Orientation Threshold)¶
ist die maximale Abweichung der TCP-z-Achse am Greifpunkt von der z-Achse der bevorzugten TCP-Orientierung in Grad. Es werden nur Greifpunkte zurückgeliefert, deren Orientierungsabweichung kleiner als der angegebene Wert ist. Falls der Wert auf Null gesetzt wird, sind alle Abweichungen valide.
Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?grasp_filter_orientation_threshold=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?grasp_filter_orientation_threshold=<value>
allow_any_grasp_z_rotation (Beliebige Greifrotation um Z)¶
Wenn der Wert auf True gesetzt ist, werden die x-Achsen der zurückgegebenen Greifpunkte nicht mehr notwendigerweise an der maximalen Ausdehnung der greifbaren Ellipse ausgerichtet, sondern können eine beliebige Drehung um die z-Achse haben. Die zurückgegebenen Werte von
max_suction_surface_lengthundmax_suction_surface_widthsind dann gleich und entsprechen dem kleinsten Durchmesser der größten greifbaren Ellipsenfläche. Dieser Parameter eröffnet dem Roboter mehr Optionen zum Greifen von Objekten, insbesondere in Szenen, in denen es zu Kollisionen kommen kann. Da der Greifpunkt jedoch nicht mehr mit der greifbaren Ellipse ausgerichtet ist, muss bei Objektmodellen vom TypUNKNOWNdie korrekte Ausrichtung zum Platzieren des Objekts auf andere Weise bestimmt werden. Im Fall von ItemPickAI kann die Pose des zugehörigen ``item` verwendet werden, um die richtige Greiforientierung für die Platzierung zu bestimmen.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?allow_any_grasp_z_rotation=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?allow_any_grasp_z_rotation=<value>
allow_any_grasp_pose (Beliebige Greifposen)¶
Wenn dieser Parameter aktiv ist, werden die Greifpunkte nicht mehr zwangsläufig auf dem Objekt zentriert und an der Hauptachse des Objekts ausgerichtet, sondern können sich an beliebiger Stelle des Objekts befinden, wo greifbare Oberflächen vorhanden sind. Dazu werden die segmentierten Objektoberflächen mithilfe der Cluster Parameter unterteilt, um die greifbaren Flächen eines Objekts zu ermitteln. Dieser Parameter hat keine Auswirkung, wenn der Objektmodell Typ
UNKNOWNverwendet wird.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?allow_any_grasp_pose=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?allow_any_grasp_pose=<value>
check_collisions_with_point_cloud (Kollisionsprüfung mit Punktwolke)¶
Dieser Parameter wird nur beachtet, wenn die Kollisionsprüfung durch Übergabe eines Greifers an den
compute_graspsodercompute_grasps_extendedService aktiviert ist. Wenncheck_collisions_with_point_cloudauf true gesetzt ist, werden alle Greifpunkte auf Kollisionen zwischen dem Greifer und einer wasserdichten Version der Punktwolke geprüft. Nur Greifpunkte, bei denen der Greifer nicht in Kollision mit dieser Punktwolke wäre, werden zurückgeliefert.Über die REST-API kann dieser Parameter wie folgt gesetzt werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/parameters?check_collisions_with_point_cloud=<value>PUT http://<host>/api/v1/nodes/rc_itempick/parameters?check_collisions_with_point_cloud=<value>
Statuswerte¶
Das rc_itempick Modul meldet folgende Statuswerte:
| Name | Beschreibung |
|---|---|
data_acquisition_time |
Zeit in Sekunden, für die beim letzten Aufruf auf Bilddaten gewartet werden musste. |
grasp_computation_time |
Laufzeit für die Greifpunktberechnung beim letzten Aufruf in Sekunden |
last_timestamp_processed |
Zeitstempel des letzten verarbeiteten Bilddatensatzes |
load_carrier_detection_time |
Laufzeit für die letzte Load Carrier Erkennung in Sekunden |
processing_time |
Laufzeit für die letzte Erkennung (einschließlich Load Carrier Detektion) in Sekunden |
state |
Aktueller Zustand des rc_itempick Moduls |
Folgende state-Werte werden gemeldet.
| Zustand | Beschreibung |
|---|---|
| IDLE | Das Modul ist inaktiv. |
| RUNNING | Das Modul wurde gestartet und ist bereit, Load Carrier zu erkennen und Greifpunkte zu berechnen. |
| FATAL | Ein schwerwiegender Fehler ist aufgetreten. |
Services¶
Die angebotenen Services von rc_itempick können mithilfe der REST-API-Schnittstelle oder der rc_cube Web GUI ausprobiert und getestet werden.
Das ItemPick und ItemPickAI Modul stellt folgende Services zur Verfügung.
compute_grasps¶
löst die Erkennung von Greifpunkten für einen Sauggreifer aus, wie in Berechnung der Greifpunkte beschrieben.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/compute_graspsPUT http://<host>/api/v1/nodes/rc_itempick/services/compute_graspsObligatorische Serviceargumente:
pose_frame: siehe Hand-Auge-Kalibrierung.
suction_surface_length: Länge der Greiffläche des verwendeten Vakuum-Greifsystems.
suction_surface_width: Breite der Greiffläche des verwendeten Vakuum-Greifsystems.Möglicherweise benötigte Serviceargumente:
robot_pose: siehe Hand-Auge-Kalibrierung.Optionale Serviceargumente:
load_carrier_id: ID des Load Carriers, welcher die zu greifenden Objekte enthält.
load_carrier_compartment: Teilvolumen (Fach oder Abteil) in einem zu detektierenden Load Carrier (Behälter), in dem Objekte erkannt werden sollen (siehe Load Carrier Abteile).
region_of_interest_id: Fallsload_carrier_idgesetzt ist, die ID der 3D Region of Interest, innerhalb welcher nach dem Load Carrier gesucht wird. Andernfalls die ID der 3D Region of Interest, innerhalb der Greifpunkte berechnet werden.
item_models: Liste von Objektmodellen, die erkannt werden sollen. Im Fall von ItemPick wird aktuell nur ein einzelnes Objektmodell vom TypUNKNOWNmit minimaler und maximaler Größe unterstützt, wobei die minimale Größe kleiner als die maximale Größe sein muss.Im Fall von ItemPickAI werden aktuell Objektmodelle vom Typ
BAG,CONSUMER_GOODSundSHEET_METALunterstützt.
collision_detection: siehe Integrierte Kollisionsprüfung in anderen ModulenDie Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "collision_detection": { "gripper_id": "string", "pre_grasp_offset": { "x": "float64", "y": "float64", "z": "float64" } }, "item_models": [ { "type": "string", "unknown": { "max_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "min_dimensions": { "x": "float64", "y": "float64", "z": "float64" } } } ], "load_carrier_compartment": { "box": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } }, "load_carrier_id": "string", "pose_frame": "string", "region_of_interest_id": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "suction_surface_length": "float64", "suction_surface_width": "float64" } }
load_carriers: Liste der erkannten Load Carrier (Behälter).
grasps: sortierte Liste von Sauggreifpunkten.
items: Liste von erkannten Objekten, die zu den zurückgelieferten Greifpunkten gehören. Im Fall von ItemPick ist diese Liste immer leer.Im Fall von ItemPickAI enthält
itemsdie segmentierten Objekte vom TypBAG,CONSUMER_GOODSoderSHEET_METALmit ihren Posen bezogen auf den Mittelpunkt der Bounding Box (kleinste umschließende Box) des sichtbaren Teils des Objekts und die Abmessungen dieser Bounding Box.
timestamp: Zeitstempel des Bildes, auf dem die Erkennung durchgeführt wurde.
return_code: enthält mögliche Warnungen oder Fehlercodes und Nachrichten.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "compute_grasps", "response": { "grasps": [ { "item_uuid": "string", "max_suction_surface_length": "float64", "max_suction_surface_width": "float64", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "quality": "float64", "tcp_id": "string", "timestamp": { "nsec": "int32", "sec": "int32" }, "type": "string", "uuid": "string" } ], "items": [ { "bounding_box": { "x": "float64", "y": "float64", "z": "float64" }, "grasp_uuids": [ "string" ], "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "timestamp": { "nsec": "int32", "sec": "int32" }, "type": "string", "uuid": "string" } ], "load_carriers": [ { "height_open_side": "float64", "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "overfilled": "bool", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_ledge": { "x": "float64", "y": "float64" }, "rim_step_height": "float64", "rim_thickness": { "x": "float64", "y": "float64" }, "type": "string" } ], "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } } }
compute_grasps_extended¶
löst die Erkennung von Greifpunkten für einen Sauggreifer aus. Dieser Service verhält sich analog zu
compute_grasps, gibt aber die Objektinformationenitemfür jeden Greifpunkt direkt zurück, anstatt sie in einer separaten Liste zu speichern. Dies ermöglicht ein einfacheres Parsen, wenn Objektinformationen für die Greifpunkte benötigt werden.Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/compute_grasps_extendedPUT http://<host>/api/v1/nodes/rc_itempick/services/compute_grasps_extendedSiehe
compute_graspsService.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "collision_detection": { "gripper_id": "string", "pre_grasp_offset": { "x": "float64", "y": "float64", "z": "float64" } }, "item_models": [ { "type": "string", "unknown": { "max_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "min_dimensions": { "x": "float64", "y": "float64", "z": "float64" } } } ], "load_carrier_compartment": { "box": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } } }, "load_carrier_id": "string", "pose_frame": "string", "region_of_interest_id": "string", "robot_pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "suction_surface_length": "float64", "suction_surface_width": "float64" } }
load_carriers: Liste der erkannten Load Carrier (Behälter).
grasps: sortierte Liste von Sauggreifpunkten. Jeder Greifpunkt enthält auch dieitemInformation, falls verfügbar.Im Fall von ItemPickAI enthält jedes
itemdas segmentierte Objekt vom TypBAG,CONSUMER_GOODSoderSHEET_METALmit seiner Pose bezogen auf den Mittelpunkt der Bounding Box (kleinste umschließende Box) des sichtbaren Teils des Objekts und die Abmessungen dieser Bounding Box.
timestamp: Zeitstempel des Bildes, auf dem die Erkennung durchgeführt wurde.
return_code: enthält mögliche Warnungen oder Fehlercodes und Nachrichten.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "compute_grasps_extended", "response": { "grasps": [ { "item": { "bounding_box": { "x": "float64", "y": "float64", "z": "float64" }, "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "type": "string", "uuid": "string" }, "max_suction_surface_length": "float64", "max_suction_surface_width": "float64", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "quality": "float64", "tcp_id": "string", "timestamp": { "nsec": "int32", "sec": "int32" }, "type": "string", "uuid": "string" } ], "load_carriers": [ { "height_open_side": "float64", "id": "string", "inner_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "outer_dimensions": { "x": "float64", "y": "float64", "z": "float64" }, "overfilled": "bool", "pose": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "position": { "x": "float64", "y": "float64", "z": "float64" } }, "pose_frame": "string", "rim_ledge": { "x": "float64", "y": "float64" }, "rim_step_height": "float64", "rim_thickness": { "x": "float64", "y": "float64" }, "type": "string" } ], "return_code": { "message": "string", "value": "int16" }, "timestamp": { "nsec": "int32", "sec": "int32" } } }
set_preferred_orientation¶
speichert die bevorzugte TCP-Orientierung zum Berechnen der Erreichbarkeit der Greifpunkte, die zur Filterung und optional zur Sortierung der vom
compute_graspsundcompute_grasps_extendedService zurückgelieferten Greifpunkte verwendet wird (siehe Setzen der bevorzugten TCP-Orientierung).Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/set_preferred_orientationPUT http://<host>/api/v1/nodes/rc_itempick/services/set_preferred_orientationDie Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "pose_frame": "string" } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "set_preferred_orientation", "response": { "return_code": { "message": "string", "value": "int16" } } }
get_preferred_orientation¶
gibt die bevorzugte TCP-Orientierung zurück, die für die Filterung und optional für die Sortierung der vom
compute_graspsundcompute_grasps_extendedService zurückgelieferten Greifpunkte verwendet wird (siehe Setzen der bevorzugten TCP-Orientierung).Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/get_preferred_orientationPUT http://<host>/api/v1/nodes/rc_itempick/services/get_preferred_orientationDieser Service hat keine Argumente.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "get_preferred_orientation", "response": { "orientation": { "w": "float64", "x": "float64", "y": "float64", "z": "float64" }, "pose_frame": "string", "return_code": { "message": "string", "value": "int16" } } }
set_sorting_strategies¶
speichert die gewählte Strategie zur Sortierung der Greifpunkte, die vom
compute_graspsundcompute_grasps_extendedService zurückgeliefert werden (siehe Berechnung der Greifpunkte).Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/set_sorting_strategiesPUT http://<host>/api/v1/nodes/rc_itempick/services/set_sorting_strategiesNur eine Sortierstrategie darf einen Gewichtswert
weightgrößer als 0 haben. Wenn alle Werte fürweightauf 0 gesetzt sind, wird die Standardsortierstrategie verwendet.Wenn der Wert
weightfürdirectiongesetzt ist, mussvectorden Richtungsvektor enthalten undpose_frameaufcameraoderexternalgesetzt sein.Wenn der Wert
weightfürdistance_to_pointgesetzt ist, musspointden Sortierpunkt enthalten undpose_frameaufcameraoderexternalgesetzt sein.Die Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "direction": { "pose_frame": "string", "vector": { "x": "float64", "y": "float64", "z": "float64" }, "weight": "float64" }, "distance_to_point": { "farthest_first": "bool", "point": { "x": "float64", "y": "float64", "z": "float64" }, "pose_frame": "string", "weight": "float64" }, "gravity": { "weight": "float64" }, "surface_area": { "weight": "float64" } } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "set_sorting_strategies", "response": { "return_code": { "message": "string", "value": "int16" } } }
get_sorting_strategies¶
gibt die gewählte Sortierstrategie zurück, die zur Sortierung der vom
compute-graspsService zurückgelieferten Greifpunkte verwendet wird (siehe Berechnung der Greifpunkte).Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/get_sorting_strategiesPUT http://<host>/api/v1/nodes/rc_itempick/services/get_sorting_strategiesDieser Service hat keine Argumente.Wenn alle Werte für
weight0 sind, wird die Standardsortierstrategie verwendet.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "get_sorting_strategies", "response": { "direction": { "pose_frame": "string", "vector": { "x": "float64", "y": "float64", "z": "float64" }, "weight": "float64" }, "distance_to_point": { "farthest_first": "bool", "point": { "x": "float64", "y": "float64", "z": "float64" }, "pose_frame": "string", "weight": "float64" }, "gravity": { "weight": "float64" }, "return_code": { "message": "string", "value": "int16" }, "surface_area": { "weight": "float64" } } }
start¶
startet das Modul und versetzt es in den Zustand
RUNNING.Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/startPUT http://<host>/api/v1/nodes/rc_itempick/services/startDieser Service hat keine Argumente.Es kann vorkommen, dass der Zustandsübergang noch nicht vollständig abgeschlossen ist, wenn die Serviceantwort generiert wird. In diesem Fall liefert diese den entsprechenden, sich von
IDLEunterscheidenden Zustand zurück.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "start", "response": { "accepted": "bool", "current_state": "string" } }
stop¶
stoppt das Modul und versetzt es in den Zustand
IDLE.Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/stopPUT http://<host>/api/v1/nodes/rc_itempick/services/stopDieser Service hat keine Argumente.Es kann vorkommen, dass der Zustandsübergang noch nicht vollständig abgeschlossen ist, wenn die Serviceantwort generiert wird. In diesem Fall liefert diese den entsprechenden, sich von
IDLEunterscheidenden Zustand zurück.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "stop", "response": { "accepted": "bool", "current_state": "string" } }
trigger_dump¶
speichert die Detektion auf dem angeschlossenen USB Speicher, die dem übergebenen Zeitstempel entspricht, oder die letzte, falls kein Zeitstempel angegeben wurde.
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/trigger_dumpPUT http://<host>/api/v1/nodes/rc_itempick/services/trigger_dumpDie Definition der Request-Argumente mit jeweiligen Datentypen ist:
{ "args": { "comment": "string", "timestamp": { "nsec": "int32", "sec": "int32" } } }Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "trigger_dump", "response": { "return_code": { "message": "string", "value": "int16" } } }
reset_defaults¶
stellt die Werkseinstellungen der Parameter und der Sortierstrategie dieses Moduls wieder her und wendet sie an („factory reset“).
Details
Dieser Service kann wie folgt aufgerufen werden.
PUT http://<host>/api/v2/pipelines/<0,1,2,3>/nodes/rc_itempick/services/reset_defaultsPUT http://<host>/api/v1/nodes/rc_itempick/services/reset_defaultsDieser Service hat keine Argumente.Die Definition der Response mit jeweiligen Datentypen ist:
{ "name": "reset_defaults", "response": { "return_code": { "message": "string", "value": "int16" } } }
Rückgabecodes¶
Zusätzlich zur eigentlichen Serviceantwort gibt jeder Service einen sogenannten return_code bestehend aus einem Integer-Wert und einer optionalen Textnachricht zurück. Erfolgreiche Service-Anfragen werden mit einem Wert von 0 quittiert. Positive Werte bedeuten, dass die Service-Anfrage zwar erfolgreich bearbeitet wurde, aber zusätzliche Informationen zur Verfügung stehen. Negative Werte bedeuten, dass Fehler aufgetreten sind. Für den Fall, dass mehrere Rückgabewerte zutreffend wären, wird der kleinste zurückgegeben, und die entsprechenden Textnachrichten werden in return_code.message akkumuliert.
Die folgende Tabelle listet die möglichen Rückgabe-Codes auf:
| Code | Beschreibung |
|---|---|
| 0 | Erfolgreich |
| -1 | Ungültige(s) Argument(e) |
| -3 | Ein interner Timeout ist aufgetreten, beispielsweise während der Boxerkennung, wenn der Bereich der angegebenen Abmessungen zu groß ist. |
| -4 | Die maximal erlaubte Zeitspanne für die interne Akquise der Bilddaten wurde überschritten. |
| -8 | Das Template wurde während der Detektion gelöscht. |
| -10 | Das neue Element konnte nicht hinzugefügt werden, da die maximal speicherbare Anzahl an Load Carriern, ROIs oder Templates überschritten wurde. |
| -11 | Sensor nicht verbunden, nicht unterstützt oder nicht bereit |
| -12 | Ressource ausgelastet, z.B. wenn trigger_dump zu häufig aufgerufen wird |
| -200 | Ein schwerwiegender interner Fehler ist aufgetreten. |
| -301 | Für die Anfrage zur Greifpunktberechnung compute_grasps oder compute_grasps_extended wurden mehrere Objektmodelle (item_models) übergeben. |
| 10 | Die maximal speicherbare Anzahl an Load Carriern, ROIs oder Templates wurde erreicht. |
| 11 | Mit dem Aufruf von set_load_carrier oder set_region_of_interest wurde ein bereits existierendes Objekt mit derselben id überschrieben. |
| 100 | Die angefragten Load Carrier wurden in der Szene nicht gefunden. |
| 101 | Es wurden keine gültigen Greifflächen in der Szene gefunden. |
| 102 | Der detektierte Load Carrier ist leer. |
| 103 | Alle berechneten Greifpunkte sind in Kollision. |
| 112 | Die Detektionen eines oder mehrerer Cluster wurden verworfen, da die minimale Clusterabdeckung nicht erreicht wurde. |
| 115 | Objekte ohne Greifpunkte wurden gefunden |
| 300 | Ein gültiges robot_pose-Argument wurde angegeben, ist aber nicht erforderlich. |
| 999 | Zusätzliche Hinweise für die Anwendungsentwicklung |