Operator Library: Hardware Platform
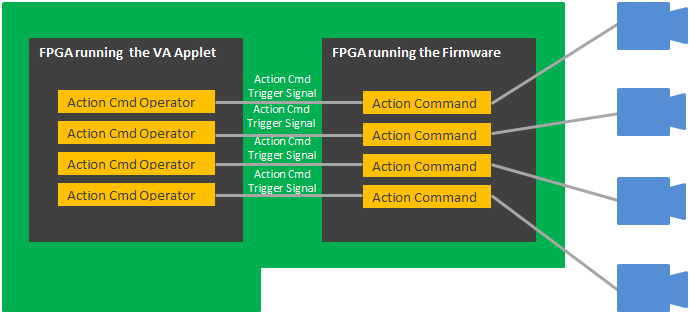
The operator Action Command sends an action command trigger signal to the firmware. On receiving this trigger signal, the firmware sends a preconfigured action command to the GigE Vision camera.
The operator fires a trigger at detecting a rising edge at its input port. The operator guarantees that the trigger signal has a minimum pulse width of three clock cycles. This ensures the firmware detects the trigger signal.
For each camera channel, one action command is available. Maximally four resources of type Action Command are available. Maximally four Action Command operators can be used in a design. The index number of the action command is the same as the index number of the connected camera port.
For each action command the camera receives, it returns an action command acknowledge packet.
The operator offers a read parameter PendingActionCmdCount that displays the status of counter PendingActionCmdCount: As soon as operator Action Command sends a trigger signal to the firmware, counter PendingActionCmdCount is incremented. As soon as the receiving camera sends the acknowledge packet, counter PendingActionCmdCount is decremented. The counter is protected against overflow and underflow: At reaching the maximal value, the maximal value is hold. When the counter has already value zero, the counter doesn't decrement further.
Operator Action Command is a mere trigger operator. The content (function) of the action command is defined by software.
The firmware sends the action command at the rising edge of the action command trigger signal it receives from the Action Command operator.
The firmware sends the action command to the camera with a fix latency of 2000 ns +/- 16 ns. This means, the time gap between the detection of the rising edge of the action command trigger signal by the firmware and the actual sending of the action command by the firmware is always 2000 ns +/- 16 ns.
![[Caution]](../common/images/admon/caution.png) |
Keep software packets on transmitter channel small during acquisition |
|---|---|
|
The transmitter channel between firmware and camera is used for sending software packets as well as action command packets. To ensure the fix latency can be kept, make sure the software packets do not exceed a payload size of approximately 100 Byte during acquisition. |
|
Interval of minimum 2000 ns between trigger signals required |
|---|---|
|
Make sure between the sending of two action command trigger signals (back-to-back trigger signals) by the operator Action Command, there is a minimum time gap of 2000 ns. |
| Available for Hardware Platforms |
|---|
| microEnable IV VQ4-GE |
| microEnable IV VQ4-GPoE |
| Link Parameter | Input Link Signal Input Link I |
|---|---|
| Bit Width | 1 |
| Arithmetic | unsigned |
| Parallelism | 1 |
| Kernel Columns | 1 |
| Kernel Rows | 1 |
| Img Protocol | VALT_SIGNAL |
| Color Format | VAF_GRAY |
| Color Flavor | FL_NONE |
| Max. Img Width | any |
| Max. Img Height | any |
| PendingActionCmdCount | |
|---|---|
| Type | dynamic read parameter |
| Default | |
| Range | [0; 65535] |
|
Parameter PendingActionCmdCount displays the status of counter PendingActionCmdCount: As soon as operator Action Command sends a trigger signal to the firmware, counter PendingActionCmdCount is incremented. As soon as the receiving camera sends the acknowledge packet, counter PendingActionCmdCount is decremented. The counter is protected against overflow and underflow: At reaching the maximal value, the maximal value is hold. When the counter has already value zero, the counter doesn't decrement further. |
|
