Operator Library: Signal
The operator compensates runbacks of a ShaftEncoder.
The operator has an input link I which can be fed with encoder pulses On input link Dir, the current encoder direction can be defined.
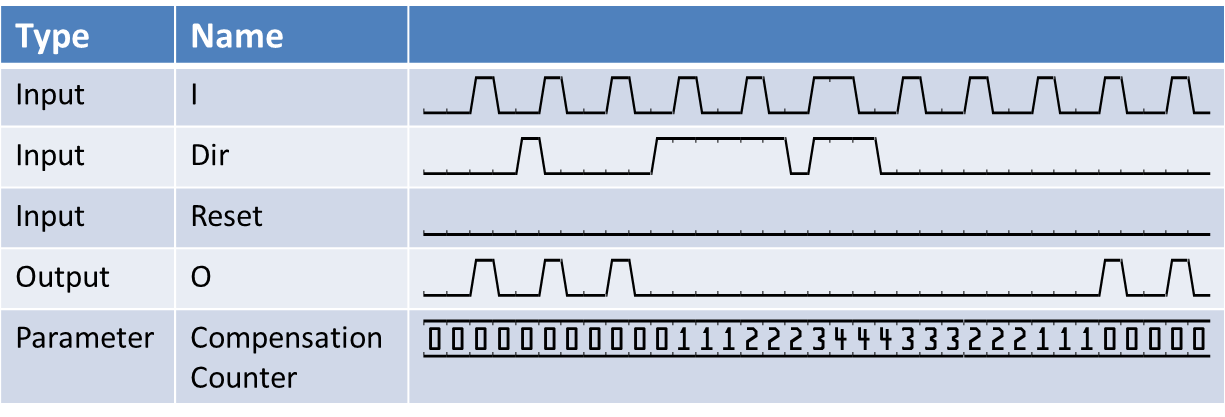
Input pulses with backward direction are suppressed at the output. However, the operator will count the input pulses with backward direction internally. When the ShaftEncoderCompensate is fed with forward pulses again, they will be still suppressed until all backward pulses are compensated. In other words, each backward input pulse increments the internal counter. Each forward input pulse decreases this counter if it is > 0. A pulse is only output for each forward input pulse if the internal counter is equal to zero.
The parameter MaxPulseBits specifies the bit width of the internal counter, i.e. ShaftEncoderCompensate can compensate 2 ^ MaxPulseBits reverse pulses at maximum. If more than 2 ^ MaxPulseBits backward pulses occur, only 2 ^ MaxPulseBits pulses during runbacks can be compensated.
The current counter value i.e. the number of pulses to be compensated can be read using parameter CompensationCounter. It is possible to overwrite the current counter value by writing a new value to this parameter.
The operator can directly be connected to operator ShaftEncoder.
In the following waveform the functionality of the operator is illustrated.
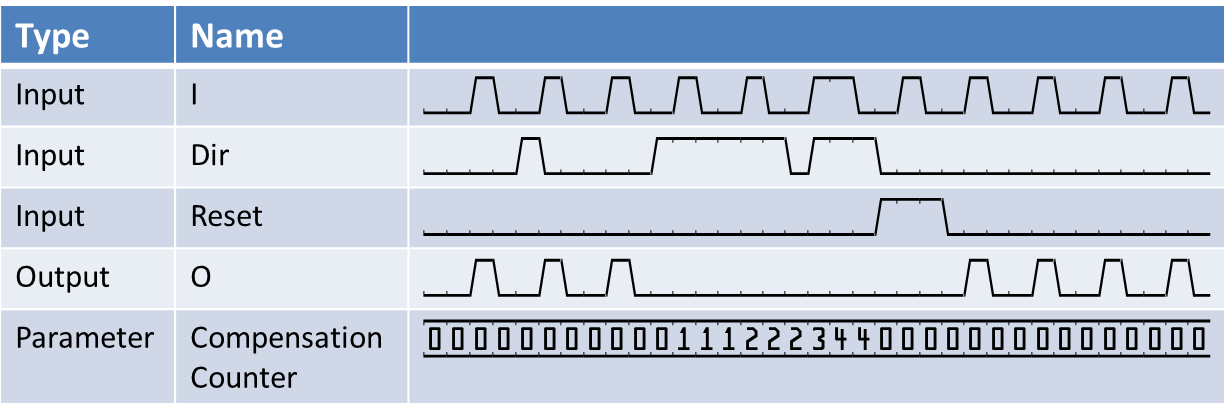
An additional reset input can be used to reset the counter as shown in the following.
This operator is excluded from the VisualApplets functional simulation.
| Property | Value |
|---|---|
| Operator Type | O |
| Input Links | I, signal data input Dir, signal data input Reset, signal data input |
| Output Link | O, signal data output |
| Link Parameter | Input Link I | Input Link Dir | Input Link Reset | Output Link O |
|---|---|---|---|---|
| Bit Width | 1 | 1 | 1 | as I |
| Arithmetic | unsigned | unsigned | unsigned | as I |
| Parallelism | 1 | 1 | 1 | as I |
| Kernel Columns | 1 | 1 | 1 | as I |
| Kernel Rows | 1 | 1 | 1 | as I |
| Img Protocol | VALT_SIGNAL | VALT_SIGNAL | VALT_SIGNAL | as I |
| Color Format | VAF_GRAY | VAF_GRAY | VAF_GRAY | as I |
| Color Flavor | FL_NONE | FL_NONE | FL_NONE | as I |
| Max. Img Width | any | any | any | as I |
| Max. Img Height | any | any | any | as I |
| MaxPulseBits | |
|---|---|
| Type | static parameter |
| Default | 10 |
| Range | [2, 32] |
|
This parameter specifies the bit width of the internal counter. |
|
| CompensationCounter | |
|---|---|
| Type | dynamic read/write parameter |
| Default | 0 |
| Range | [0, 2^MaxPulseBits-1] |
|
This parameter shows the current value of the compensation counter. Reading from the parameter shows the current value. Writing to the parameter overwrites the counter value. |
|
The use of operator ShaftEncoderCompensate is shown in the following examples:
-
'Line Scan Trigger for microEnable 5 marathon VCL Using Signal Operators and Operator CameraControl'
A line scan trigger is presented. The trigger includes an image trigger using a capture gate as well as a multi functional line trigger. External sources, an internal frequency generator or software trigger pulses can be used for trigger generation.
-
'Line Scan Trigger for microEnable 5 marathon VCX QP Using Signal Operators'
A line scan trigger is presented. The trigger includes an image trigger using a capture gate as well as a multi functional line trigger. External sources, an internal frequency generator or software trigger pulses can be used for trigger generation.
-
'Line Scan Trigger for imaFlex CXP-12 Quad Using Signal Operators'
A line scan trigger for CoaXPress12 is presented. The trigger includes an image trigger using a capture gate as well as a multi functional line trigger. External sources, an internal frequency generator or software trigger pulses can be used for trigger generation.
